Tele-remote control is divided into three parts: Fixed hydraulic crusher remote control system, Mine electric locomotive unmanned remote control system, Trackless equipment (LHD Loader) remote intelligent remote control system.
1. Fixed Hydraulic Crusher Remote Control System
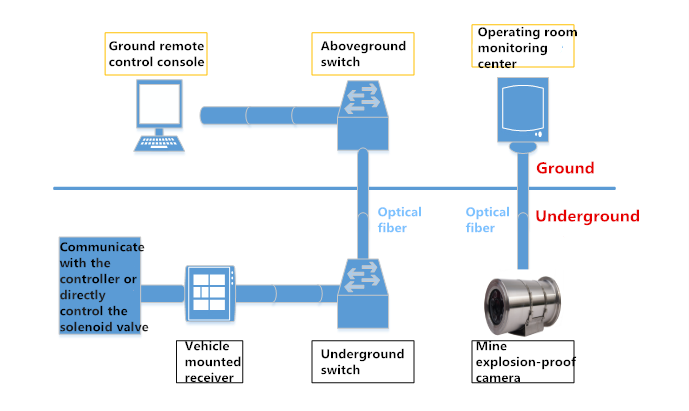
After a blasting of the ore block the prevalence of large chipper feed mouth, grid sieve can easily lead to blockage. The fixed hydraulic crusher effectively solves this problem, improve the production efficiency and production safety and reliability, many domestic mines have a good effect, is the best choice for mining enterprises to replace the secondary blasting. Our company has made a preliminary exploration on the remote control of the fixed hydraulic crusher, which can meet the construction requirements of the domestic intelligent unmanned mine remote control and automatic mining demonstration area. Remote remote control is modified in the original models of electrical and hydraulic system design, electronic control system to join the communication system and remote control procedures and remote control system, in order to achieve remote control system on the field device operating functions of the remote control.
The remote control system is suitable for the following working environment: ground remote control.
2. Mine Electric Locomotive Unmanned Remote Control System
Underground electric locomotive remote control system uses the frequency conversion technology, micro-electronic control technology, underground GIS technology, underground high-precision positioning technology and high-bandwidth, high reliability networking technology, combined with the production operation optimization scheduling model to realize downhole electric locomotive remote control operation and variable speed cruise from run. The system has satisfied the trend of mining modernization and laid an important foundation for digital mining.
Underground electric locomotive transport lines cross, more vehicles, more personnel, the scene environment is complex, production organization and safety management more difficult. Electric locomotive remote control technology, so that on-site unmanned electric locomotive, the motor vehicle operation control from the underground to the ground control room for operation, can be carried out on the underground motor vehicle transport line closed management, controllable, visual Remote operation, so that greatly enhance the degree of automation of transport, transport capacity to play a greater play, effectively prevent the casualties in the transport process, improve the safety level of underground motor vehicle transport and transport production efficiency.
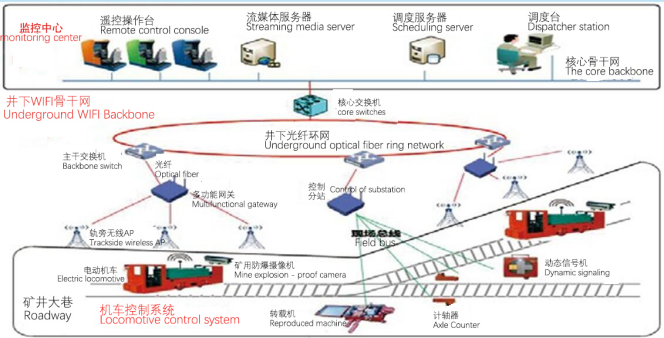
The system consists of monitoring center, underground WIFI backbone network, and locomotive control system composed of three parts, the network architecture as shown below.
3. Trackless Equipment (LHD Loader) Remote Intelligent Remote Control System.
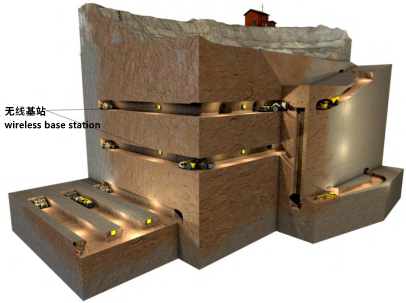
Tele remote control system applications shown in the figure, the figure represents the ground control center house; yellow box is the wireless base station.
The overall logic of the Tele remote control system is shown in Figure, which is an ergonomic remote control console for the LHD Loader. But also an important part of the central control room.
Build the control system and monitoring system in the control console. The operator can remotely control the travel and movement of the LHD Loader through the operating mechanism such as the handle on the console. The operator performs the necessary operations on the knobs, buttons, and handles on the console, and the operation is compiled and sent to the controller. And then through the wireless network on the LHD Loader start, speed, steering, throttle and brake to remote control, make it moving in required speed and required way, so as to realize remote control and monitoring of the LHD Loader. At the same time, LHD Loader transfer the real-time image and operating parameters of video signals of the road condition in the front and back of LHD Loader through the wireless network real-time transmission to the PC installed on the console display, so that the operator are able to remotely control the LHD Loader’s real driving environment, thus monitoring the operation condition of LHD Loader. The LHD Loader, the human (remote driver), and the remote control console (remote control platform, wireless router, camera, control system, etc.) form a closed-loop control system.